Research
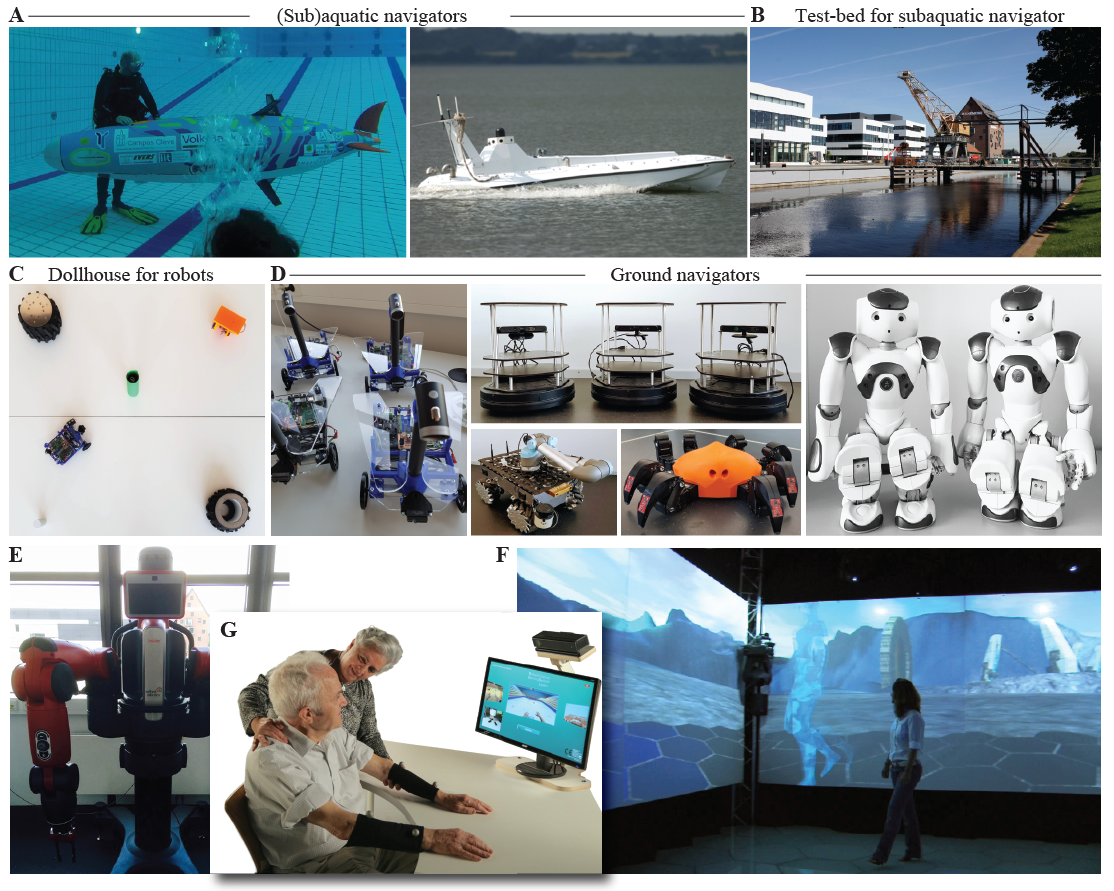
The most important barrier for robotic navigation is the inability to generate motor control when sensory information is incomplete, noisy or otherwise unreliable. The brain solves this problem via sensory fusion and inference to create abstract representations of its environment. In this way, it can create contextual information from high-dimensional input with limited computational cost. iNavigate consortium explores the possibilities to translate these neurocomputational processes to the field of autonomous navigation and robotic control. Sensorimotor decisions in the context of machine intelligence will not only benefit robotic navigation but also will help grant autonomous motor capabilities to machines. Examples of application prospects include technologies to control bionic arms, industrial arms, aquatic and land-based robots, and rehabilitation.
